This is Blue, a low-cost and robust gripper for unstructured environments. The paper detailing the gripper has been submitted to CASE 2019 and this website provides open source access to the Blue gripper for the rest of the robotics community. Along with Blue, the ball-screw version (with more backdrivability for force control) and the strain gauge version (for force sensing) are also available.
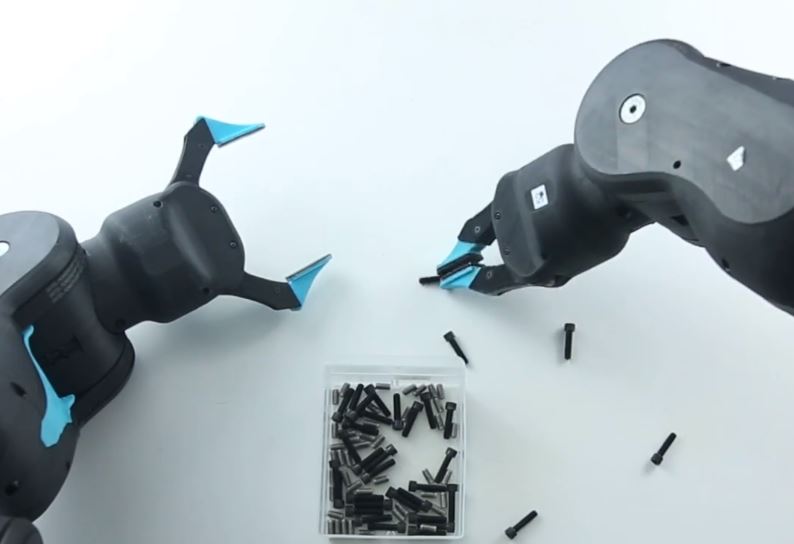
Fine Manipulation
This is the video of the gripper demonstrating fine manipulation by picking up screws.
Heavy object handling
In addition to fine object manipulation, this gripper can pinch grasp weights up to 5 lbs.
Durability Tests
This test shows the durability cycle test through low speed collisions in regular use (.2m/s) and high speed collisions in user error (2m/s).